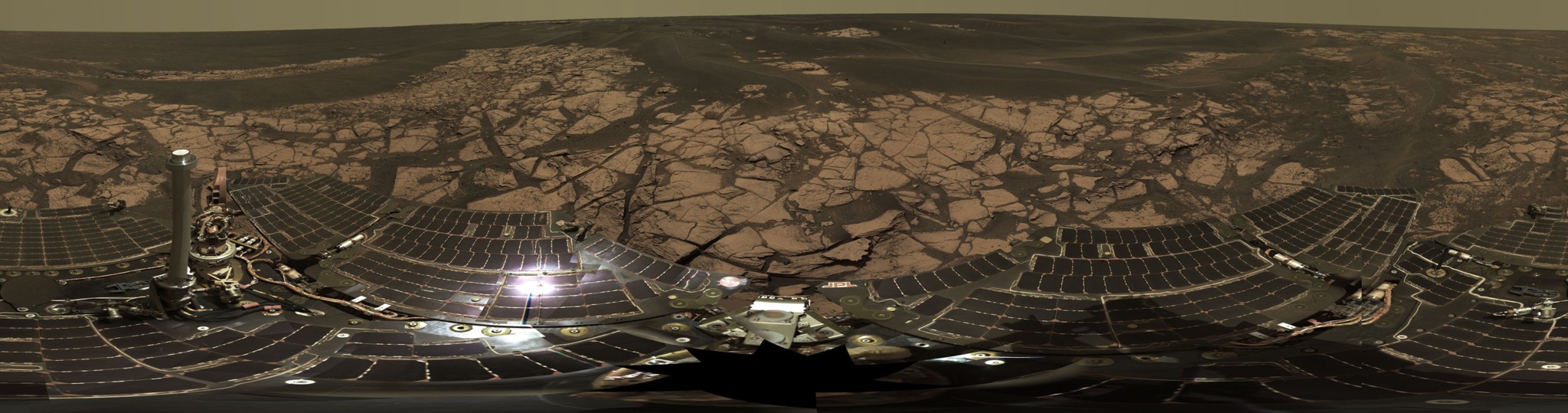
Die erzwungene Wartezeit im Erebus-Krater wurde dazu benutzt, zahlreiche Fotoaufnahmen und auch eine detaillierte Panoramaaufnahme des Standortes zu fabrizieren. Einen Teil dieses Panoramas zeigt die folgende Abbildung 1:
|
Abb. 1: Teil des Erebus-Panoramas von Anfang Januar 2006 |
Eine auf den Standort des Rovers hin berechnete geometrische Anordung des Bildes aus Abbildung 1 in Falschfarbendarstellung zeigt die Abbildung 2, die besonders schön die in Nord-Südrichtung verlaufende Anordnung der im Gebiet des Erebus-Kraters vorherrschenden Dünen zeigt:
|
Abb. 2: "Luftaufnahme" der Roverposition vom 4. Januar 2006 |
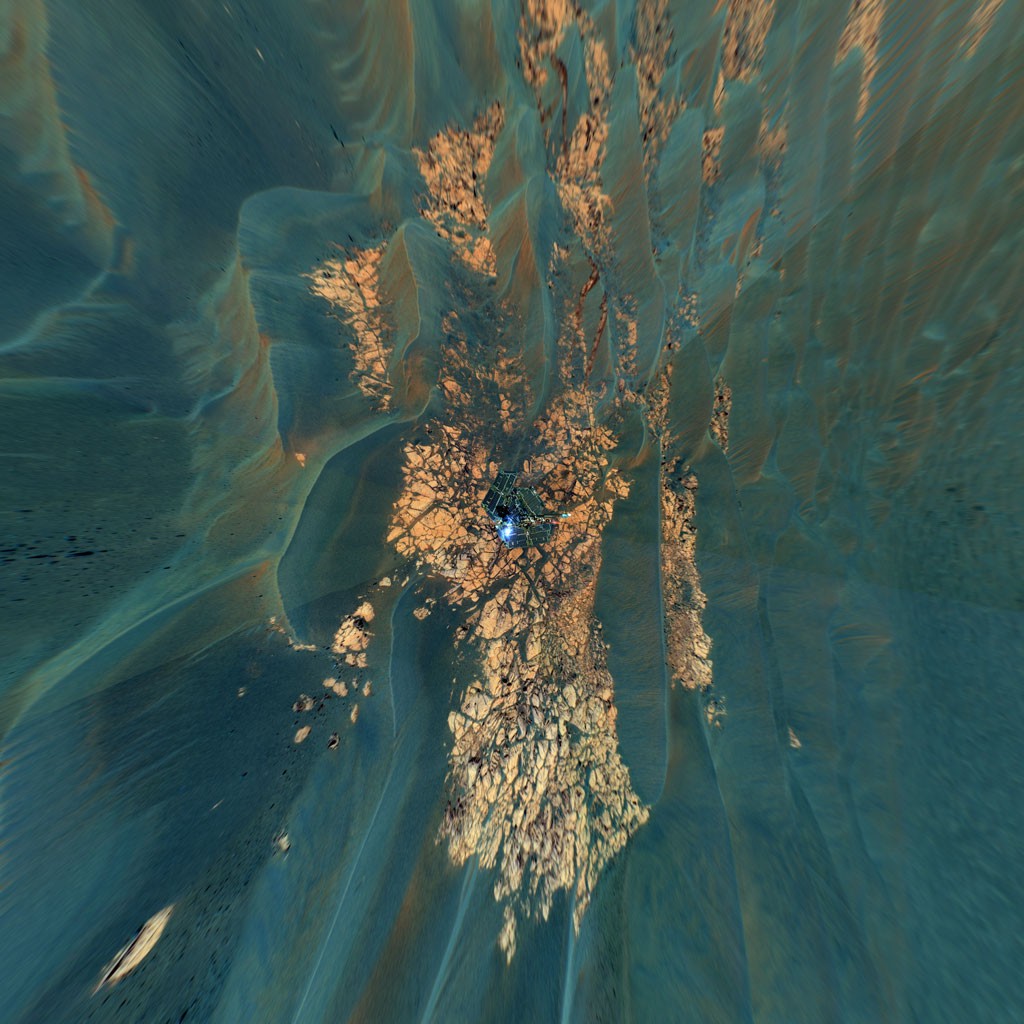
Dieses Bild zeigt die Szenerie eines über dem Geschehen fliegenden Beobachters. Man sieht hier sehr schön die von Norden kommende Spur des Rovers im Sand zwischen den Dünen.
Als Vergleich noch einmal die letzte Orbitalaufnahme von "Mars Global Surveyor" (MGS) vom 19. November 2005
|
|
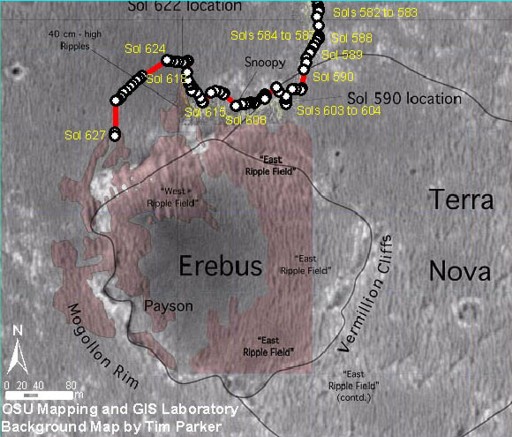
Abb. 3: Übersichtskarte an Sol 630 mit Anmerkungen zu den Bereichen des Kraters Erebus |
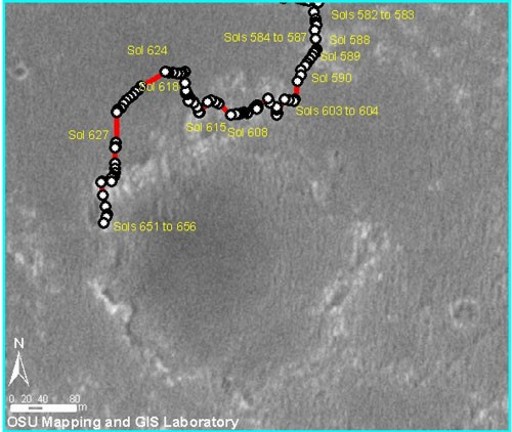
Abb. 4: Übersichtskarte an Sol 656 |
Es musste eine Lösung für das Instrumentenarmproblem gefunden werden. Sonst konnte der Rover nicht mehr weiter fahren, da ohne Arretierung des Arms während der Fahrt dieser gefährdet ist und der Rover in ernsthafte Schwierigkeiten kommen könnte. Dies war nun schon das zweite altersbedingte Problem von Opportunity, denn bereits seit dem 17. April 2005 streikt der Servermotor für die Steuerung des rechten Vorderrades (siehe auch hier) in einer Stellung von 8 Grad nach links, sodass der Rover nur noch rückwärtsfahrend unter Hinterherschleifen des rechten Vorderrades einigermassen genau navigiert werden konnte. Dieses neue Problem jedoch war ernsthafterer Natur, denn es konnte die Mission des Rovers insgesamt gefährden.
Bis Ende Januar 2006 war dann eine vorläufige Lösung gefunden. Der beschädigte Arm, dessen "Ellenbogengelenk" wegen eines Kabelbruchs im dafür verantwortlichen Elektromotor in seiner Beweglichleit stark eingeschränkt war, wurde in einer neuen Position während der Fahrt des Rovers so am Chassis befestigt, dass der Ellbogen nicht bewegt werden musste, um diese Position zu erreichen. Die folgende Abbildung 5 zeigt die gefundene Lösung. Der Instrumentenaufsatz des Arms wird nun nicht mehr an einem kleinen Pin unterhalb des Haupdecks während der Fahrt fixiert, sondern auf der Oberseite direkt vor dem Sockel des Hauptantennenmastes auf den Sonnenkollektoren aufgesetzt:
|
Abb. 5: Instrumentenaufsatz des Roverarms in seiner neuen Fahrtposition |
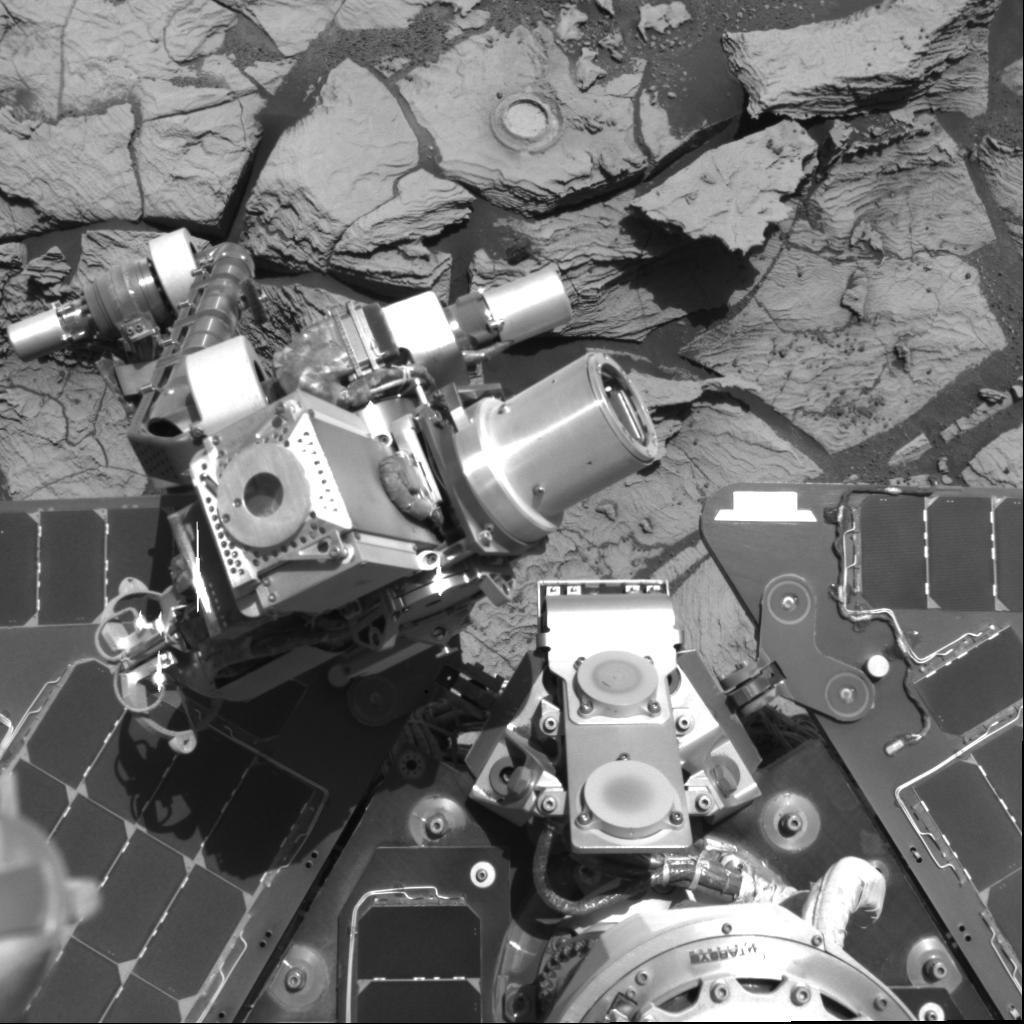
Mit dieser Hilfskonstruktion wurde der Rover am 31. Januar 2006 testweise zum erstenmal seit mehr als zwei Monaten wieder bewegt. Die kurze Fahrt war erfolgreich und das Instrumentenarmproblem schien fürs erste gelöst. Der Rover bewegte sich in südöstlicher Richtung weiter auf das eigentliche Ziel, den noch etwas mehr als 1 km entfernten großen Krater "Victoria" zu (Vergleich zurückgelegter und noch ausstehender Weg bis zu Victoria siehe hier, Victoria ist der Krater rechts unten in dem hinter diesem Link liegenden Bild). Die nächste Abbildung 6 zeigt diesen Krater als mit einer rotgrün-Brille zu betrachtenden 3D-Aufnahme, die aktuell von Mars Global Surveyor durch zweimaliges, etwas versetztes Überfliegen des Landegebietes von Opportunity gewonnen werden konnte.
|
Abb. 6: der Krater Victoria in 3D-Aufnahme |
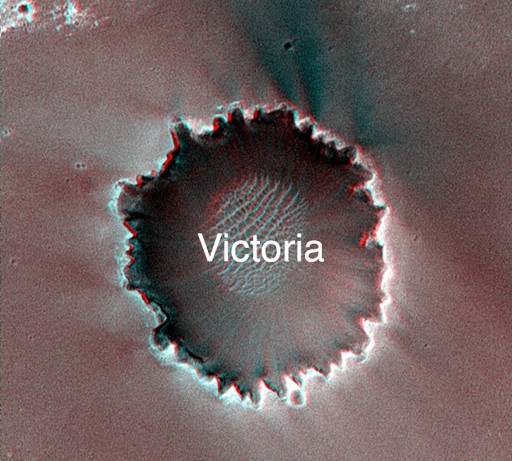
Mit einer rotgtün-Brille betrachtet zeigt sich sehr eindrucksvoll die Tiefe dieses größten von Opportunity erreichbaren Kraters im Landegebiet.
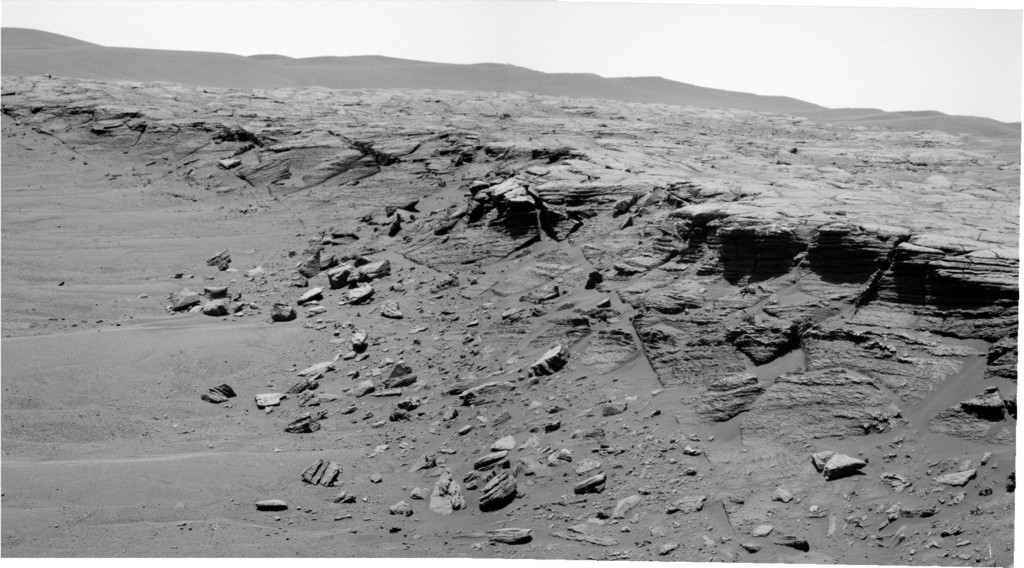
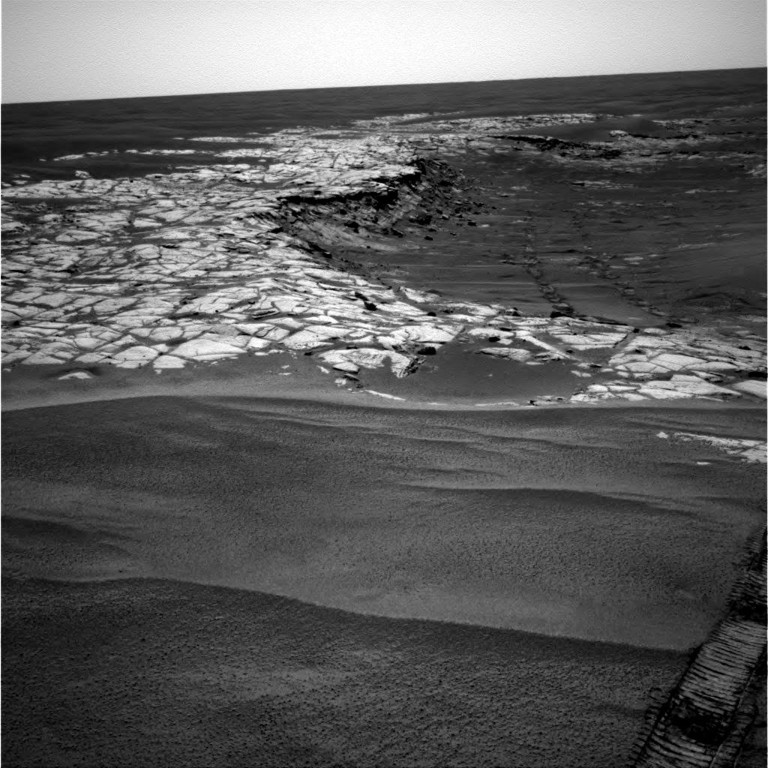
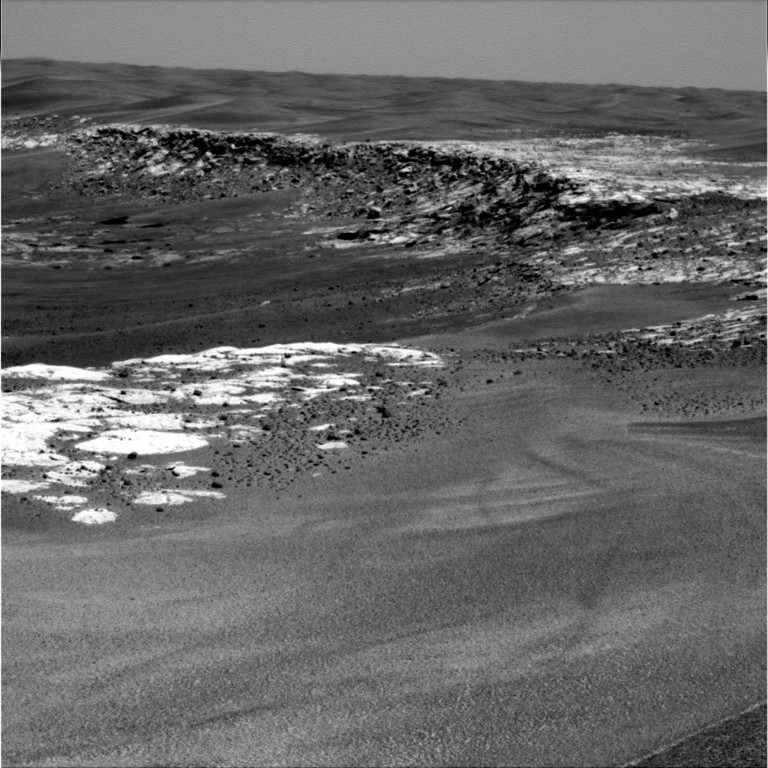
An Opportunitys Sol 741 auf dem Mars, dem 22. Februar 2006, gelang es dann endlich wieder, eine größere Wegstrecke seit dem Instrumentenarmproblem zurückzulegen. Der Rover bewegte sich etwa 25 m weiter in Richtung auf den vom Standort aus genau weiter südlich liegenden "Mogollon Rim" und seinen Bereich "Payson" zu (siehe oben Abb. 3 zur Übersicht). Der "Mogollon Rim"-Kraterrand weist deutlich zutage liegende Schichtstrukturen auf, ein weiteres interessantes Ziel für die Geologen. In den folgenden Tagen kam der Rover diesem Ziel schnell näher. Die nächsten Abbildungen 8 und 9 zeigen den Mogollon Rim, auch "Payson" genannt, aus der Nähe:
|
|
Abb. 8: der "Mogollon Rim" am 24. Februar 2006: der Kraterrand des Erebus Kraters weist eine deutliche Schichtstruktur auf |
Abb. 9: der "Mogollon Rim" am 04. März 2006 oder Sol 746: Der Rover stand bei diesem Foto noch 5m von der Abbruchkante entfernt. |

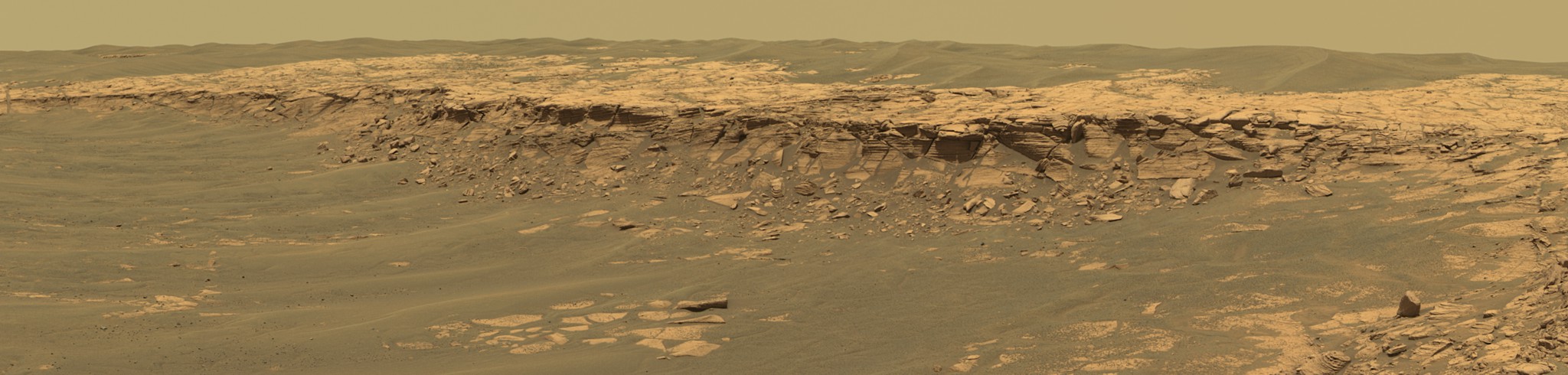
Die nächste Abbildung 10 zeigt den Mogollon Rim als Panorama in seiner ganzen farbigen Pracht, wie es die NASA am 06. März 2006 veröffentlicht hat. Der Rover war zu diesem Zeitpunkt schon entlang der Abbruchkante weitergefahren und hatte diesen Bereich im linken hinteren, flacheren Bereich verlassen:
|
Abb. 10: der "Mogollon Rim" Anfang März 2006 in seiner ganzen Pracht. |
Am 07. März 2006, an seinem Sol 753 auf der Marsoberfläche, blickte der Rover zurück auf den Weg, den er gekommen war. So sah der Blick zurück auf "Payson" entlang des Mogollon Rim aus (links) und der Weg voraus auf den südlichen Rand des Erebus-Kraters (rechts):
|
|
Abb. 11: Blick zurück auf "Payson" ... |
Abb. 12: ... und Vorausblick auf das südliche Ende des Kraters Erebus |
Als Einordung zur Lokalisierung dieser Bilder sei auf die Abbildung 3 oben auf dieser Seite hingewiesen, die den Erebus-Kraters in einer Aufnahme aus dem Orbit heraus zeigt. Bei der Aufnahme der beiden Bilder 11 und 12 war die Position des Rovers genau im grauen Bereich zwischen den rot gekennzeichneten Bereichen "Payson" und "East Ripple Field" der Abbildung 3.
Letzte Änderung am 09.03.06